NO.29 人と共存できるロボットを目指して… 卵をキャッチできる ロボットを作りたい!
先進工学部 ロボティクス学科 ロボット制御研究室 浦川 禎之 教授
■卵をキャッチできますか?
人間は飛んでくる卵をキャッチできるでしょうか?ロボットはどうでしょう?
ロボットはとても速い動きを正確に行うことができます。でも飛んでくる卵はキャッチできなさそうです。何が足りないのでしょうか? 卵をキャッチするには素早く正確な「位置制御」だけでなく、卵をキャッチしたときの「衝撃力」を制御する「力制御」の技術が必要です。しかも、飛んでくる卵に追いつく素早く正確な「位置制御」から卵を受け止める柔らかな「力制御」に瞬時に切り替えなければいけません。今まで以上に高度なロボット制御が必要になります。
■なぜ卵キャッチが必要なのでしょう?
コロナ禍で密を避けるために、人間に代わって物を運んだり料理を届けたりするサービスロボットが期待されています。また、最近は工場で使われる「産業用ロボット」でも「協働ロボット」と言われる人と一緒に作業を行うロボットが注目を集めています。このように人と一緒に作業を行うには、人と衝突しても危害を与えないことが必要です。普段の人間の動きは意図したものだけではありません。誤ってロボットに倒れ掛かってしまうことも想定されます。このように人と混在するロボットには「衝撃力」を緩和し危害を加えないようにする衝突緩和が必要です。 現在は緩衝材を装着する、モータの出力を落とす、などの手法で「柔らかいロボット」を実現する研究が多く行われています。しかし、これでは素早い動きは難しくなります。今後は、より積極的にロボットを素早く動かし、かつ衝撃を吸収する動作が必要になると考えています。卵をキャッチできるような動きが実現できれば「倒れる人を瞬時に受け止める」ロボットが実現できます。
■どのように研究を進めますか?
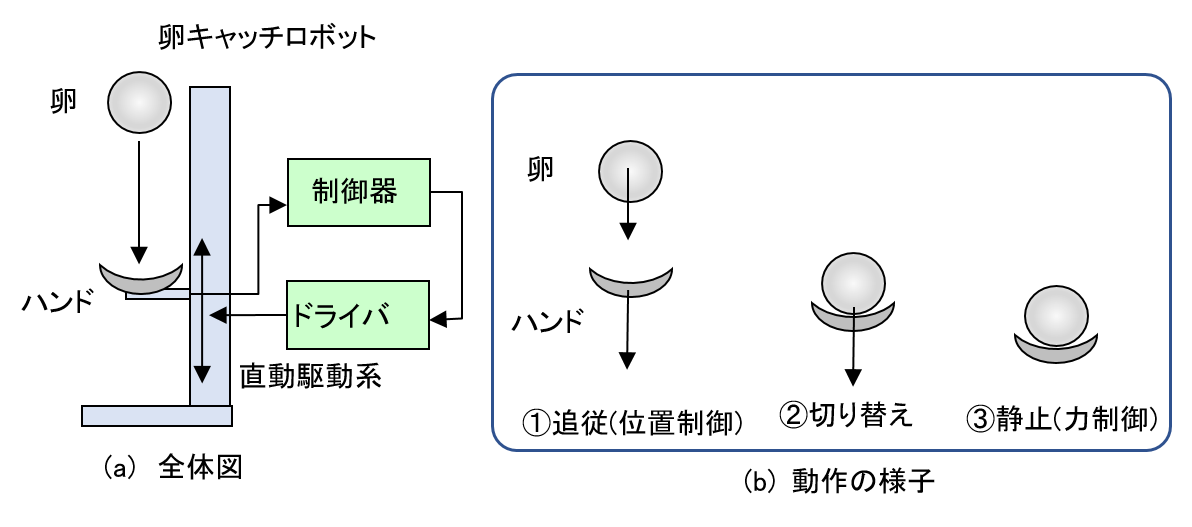
ロボットが通常素早い動きを実現するには、人間でいう「力を込めた」固い動きになります。一方、柔らかい動きをするときは「力を抜いた」弱い動きになります。卵キャッチロボットの模式図と動作を図1に示します。ロボットハンドは①上から落ちてくる卵に「位置制御」で素早く追従し、②「位置制御」から「力制御」に瞬時に切り替え、③「力制御」で卵に加わる「衝撃力」を制御しながら静止させます。素早い動きと柔らかい動きのどちらでも最高の制御性能を実現し、さらにそれを滑らかに切り替える技術を確立しないと実現できません。
浦川研では、最高の制御性能を実現できる「限定極配置法」という制御パラメータ設計法を提案しています。現在、「位置制御」に適用して素早い動きを実現したところです(動画参照:ダミーの卵を落としています)。今後「力制御」や「切り替え法」に拡張していきます。卵キャッチロボット実現にはこのような理論的な検討も必要ですし、さらには摩擦やガタなど現実的な要因をつぶしていく必要もあります。いろいろな技術を総合して今までにない機能を実現したいと考えています。
■おわりに
人間は自分で行うことは自分でよくわかっていると考えがちです。何らかの意図をもって、もしくは明確な目的があって動作していると考えています。しかし、いろいろな動作の中には「無意識」で行われるものも多くあります。例えば転びそうなときに足を踏ん張る動作など「条件反射」的な動作です。このような「無意識の動作」は自分で意識していないだけに、ロボットで再現するのも難しいです。しかし、このような「無意識」の集まりが「知能」の大きな部分を占めているのではないかと思います。卵をキャッチするような複雑な動作もこのような「無意識」のスキルの一つと考えています。「卵キャッチロボット」の研究を通して、このような「無意識と知能」の問題にも踏み込んでいきます。
TRAIN LABO NO.29 PDF